
Um die Vorwärtskinematik und Inverse Kinematik zu simulieren, wird jeweils ein Demo- Programm entwickelt.
„Vorwärts-“ bezeichnet die Transformation vom Gelenkraum nach Arbeitsraum. Sobald die Winkel aller 5 Gelenke eingestellt, werden die kartesische Koordinaten (X, Y, Z, α, β, γ) von TCP (Tool Center Point) ausgerechnet.
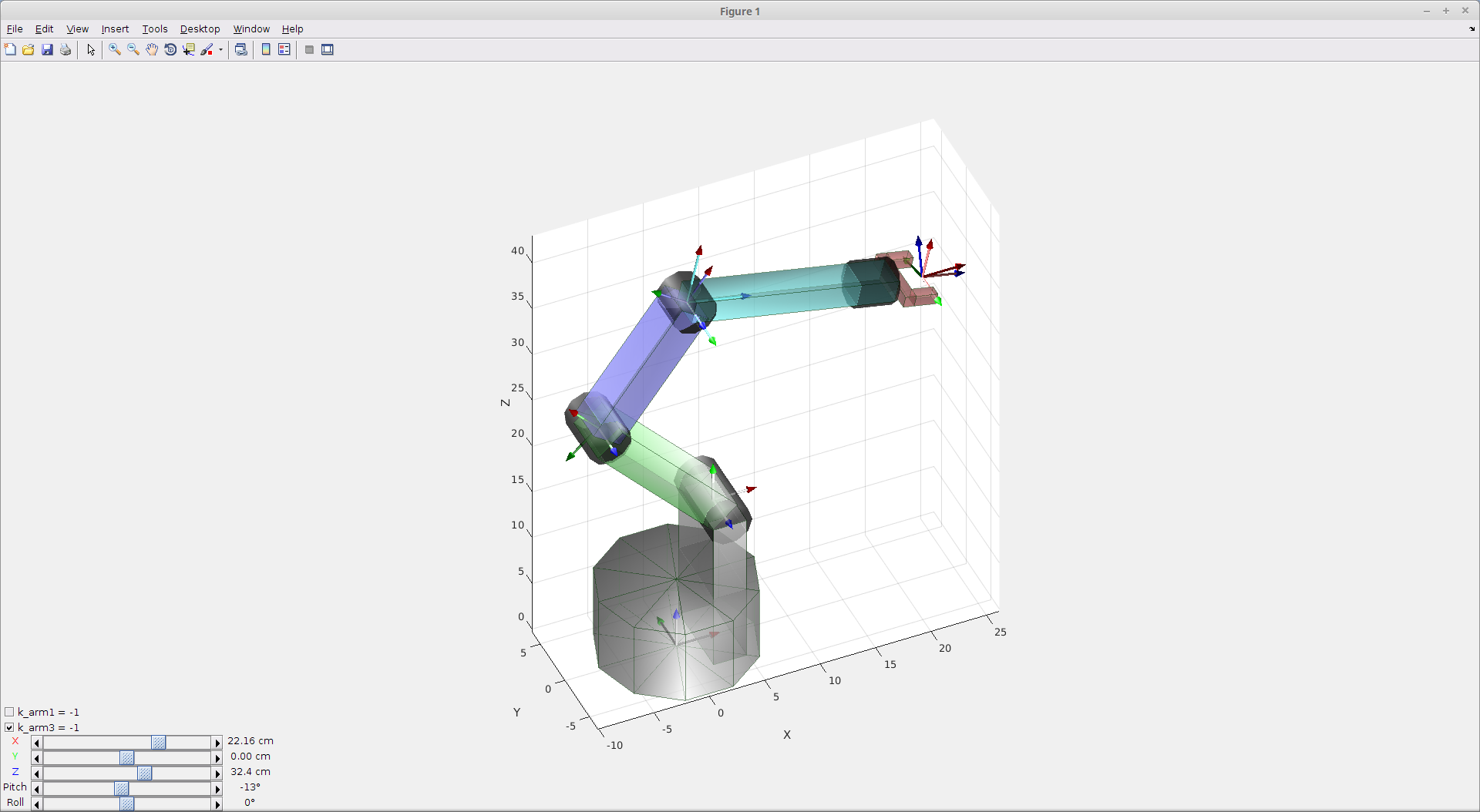
Umgekehrt bedeutet „Inverse“ die Transformation vom Arbeitsraum nach Gelenkraum. Gegeben ist die Zielposition von TCP in kartesische Koordinaten(X, Y, Z, Pitch, Roll). Die Einstellung einzelnes Gelenkes wird berechnet, um diese Zielposition zu erreichen.