
Zur Simulation und Visualisierung der Trajektorienplanung wird ein Matlab Programm entwickelt.
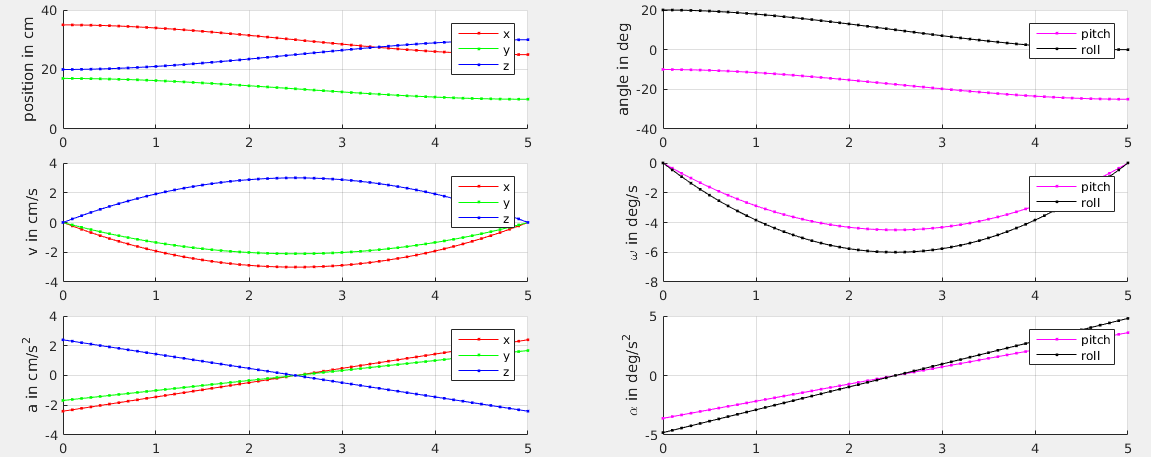
Alle kinematischen Variablen (Vershiebung, Geschwindigkeit und Beschleunigung in Gelenkraum sowie Arbeitsraum) werden gleichzeitig während der Animation dargestellt.