In den letzten Jahren sind viele Open-Source-Middlewares für Roboterplattformen entstanden. Die folgende Übersicht stammt zum Teil aus der Arbeit von Einhorn et al. [1] und wurde um weitere Frameworks ergänzt. (mehr …)
KUKA LBR @DATE 2016
Simulation und Visualisierung der Trajektorienplannung

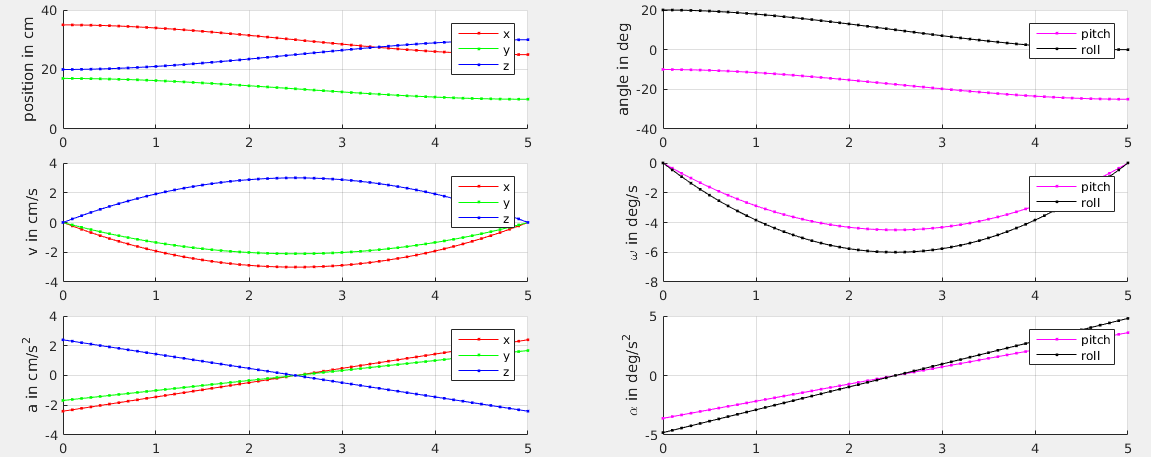
Zur Simulation und Visualisierung der Trajektorienplanung wird ein Matlab Programm entwickelt.
Alle kinematischen Variablen (Vershiebung, Geschwindigkeit und Beschleunigung in Gelenkraum sowie Arbeitsraum) werden gleichzeitig während der Animation dargestellt.
Simulation der Vorwärtskeinematik und Inversekinematik für youBot-Arm

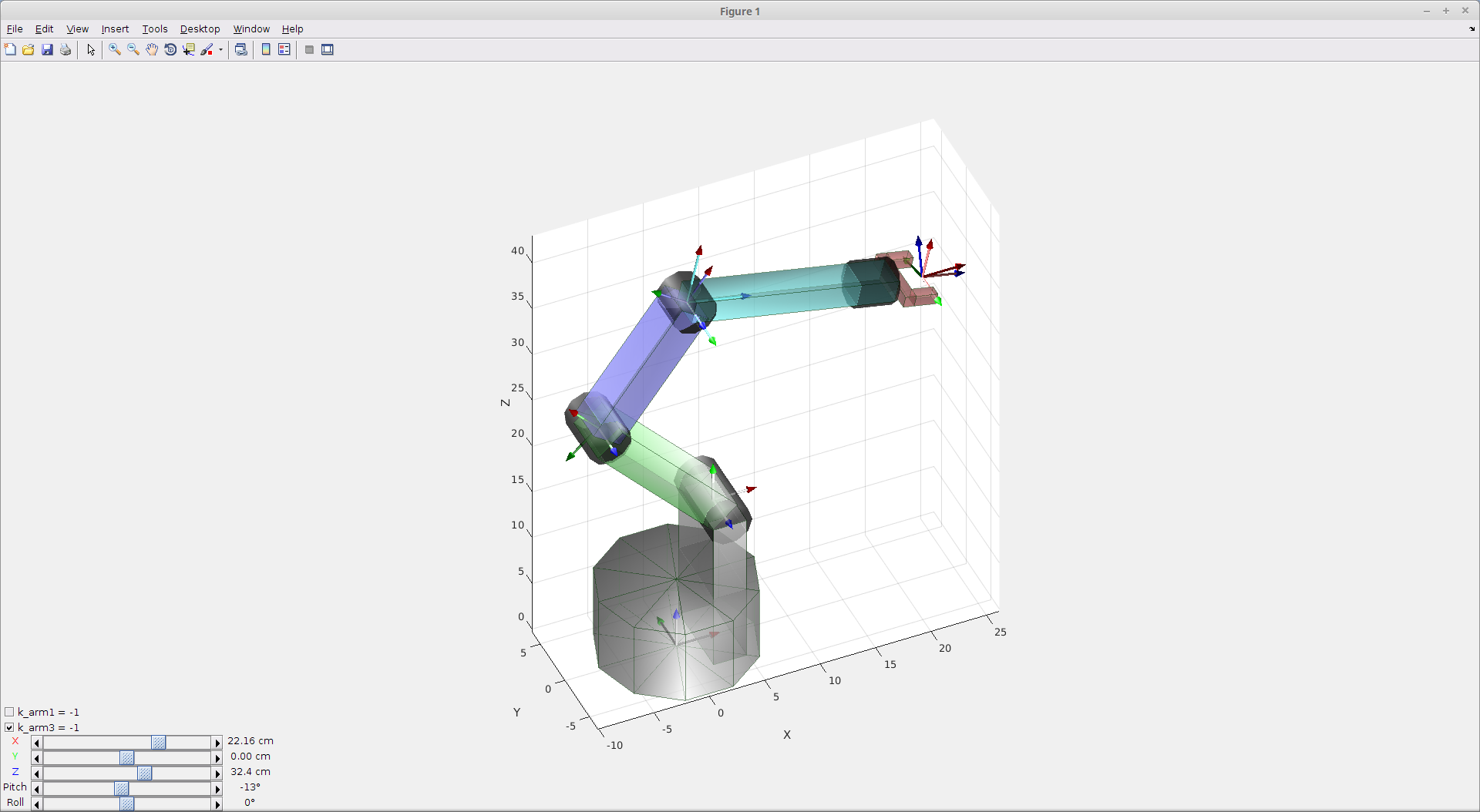
Um die Vorwärtskinematik und Inverse Kinematik zu simulieren, wird jeweils ein Demo- Programm entwickelt.
„Vorwärts-“ bezeichnet die Transformation vom Gelenkraum nach Arbeitsraum. Sobald die Winkel aller 5 Gelenke eingestellt, werden die kartesische Koordinaten (X, Y, Z, α, β, γ) von TCP (Tool Center Point) ausgerechnet.
Umgekehrt bedeutet „Inverse“ die Transformation vom Arbeitsraum nach Gelenkraum. Gegeben ist die Zielposition von TCP in kartesische Koordinaten(X, Y, Z, Pitch, Roll). Die Einstellung einzelnes Gelenkes wird berechnet, um diese Zielposition zu erreichen.
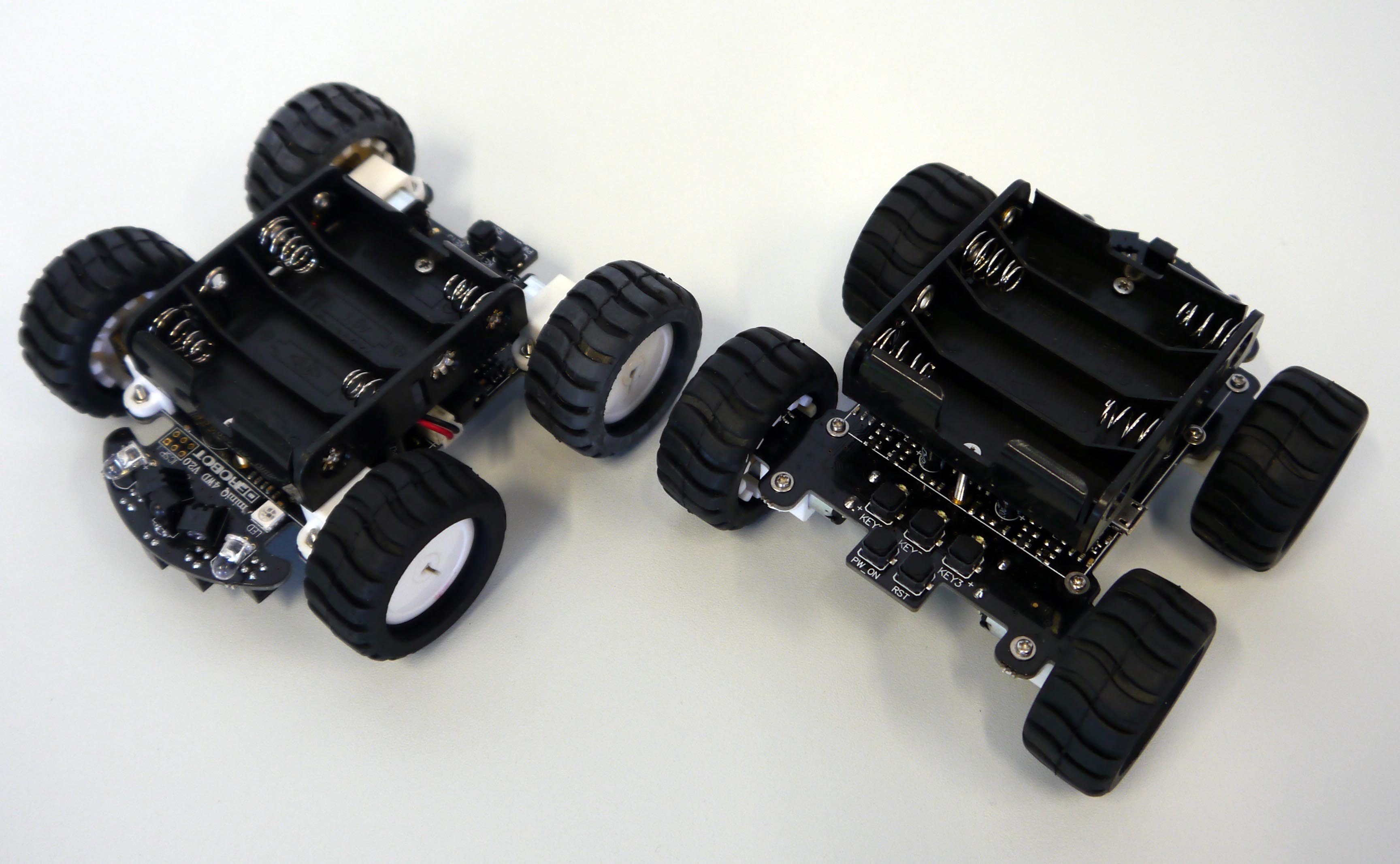
Autoroboter
Wir haben 10 dieser kleinen Autoroboter erworben. Die Frage die uns beschäftigt, kann man Schwarmverhalten von Robotern in Städten damit simulieren. Eine perfekte Fragestellung für eine studentisches Praktikum.
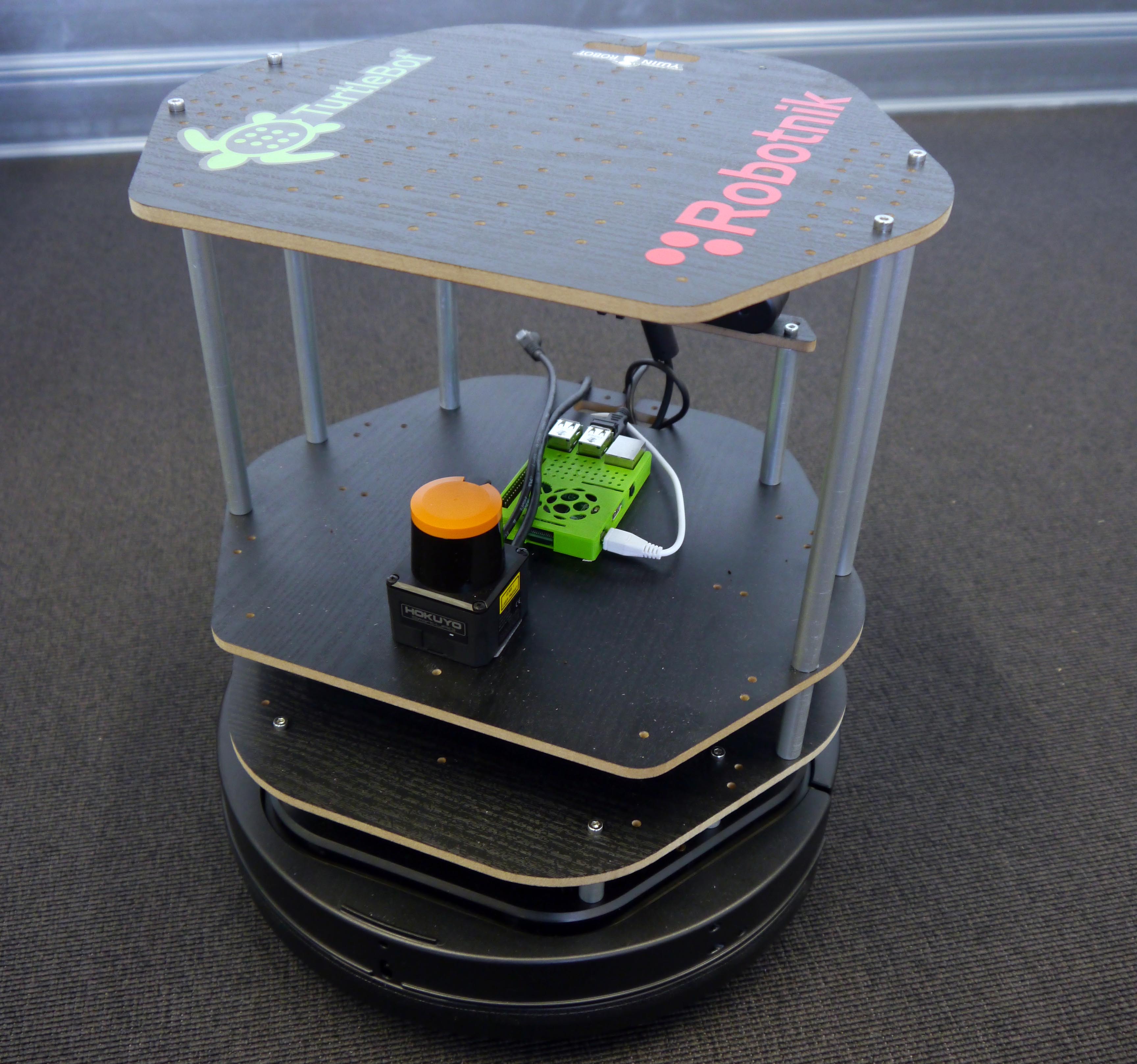
Erweiterung der TurtleBot Plattform
Nachdem der HomeTurtle mit einen Raspberry Pi ausgestattet wurde, ist genug Rechenleistung verfügbar um diesen mit den erworbenen Laserabstandsmesser auszustatten. Hierbei wird die entwickelte Steuerungssoftware basierend auf General Robots erweitert, damit die Daten des Laserscanners genutzt werden können.

Wlan Kaffeemaschine
Wir haben die erste auf dem freien Markt erhältliche über WLan steuerbare Kaffeemaschine bestellt. Damit wollen wir untersuchen in wieweit sich Robotersysteme wie der TurtleBot in den Feldern Smart Home und Internet of Things nutzen lassen. Bald ist es möglich das unsere Roboter auch Kaffe bestellen und liefern können.
Kuka Roboterarm angekommen
Da wir als Finalisten des Kuka Innovation Awards 2016 ausgewählt wurde, haben wir am heutigen Tag unseren Kuka LBR iiwa bekommen.

Laserabstandsscanner
Für eine sehr genau Indoor-Lokalisation und dem erstellen einer Karte mithilfe des SLAM-Verfahrens soll der Laserserabstandmesser beitragen.
Evaluation der BeSpoon-Indoor Lokalisiationslösung

Bei BeSpoon handelt es ich um eine Firma, die eine neue Lokalisationslösung für Gebäude entwickelt hat. Bei diesem wird mit Hilfe vom UWB (Ultra Wide Band) eine Distanzmessung vorgenommen. Es wurden 2 Evaluation Kits erworben. Dieses ist für die Forschung und Entwicklung konzipiert und besitzt des wegen viele Anschlüsse. In jeden von diesem befinden sich 2 Boards. Eines dieser Lokalisierungsboards ohne Antenne zeigt die Abbildung 1. Zur Lokalisation im Raum wurden 3 Boards als sogenannte „Tags“ konfiguriert. Ein Tag beschreibt einen Sender, der über UWB ein Signal aussendet. Das 4. Board wird als „Anchor“ konfiguriert, dieser empfängt die Signale der Tags und berechnet daraus den Abstand zu jeden von ihnen.
Die Konfiguration erfolgt über eine mitgeliefertes Werkzeug, welches nur für Windows zur Verfügung steht. Es ist sehr einfach mithilfe der mitgelieferten Kurzanleitung (PDF) das System für 3 Tags und einen Anchor zu konfigurieren. Mit dieser ist die Lokalisation im Raum möglich.
Durchgeführte Energieverbrauchsmessungen haben ergeben, dass ein Board Durchschnitt 70mA bis maximal 100mA verbraucht. Durch die einfache Stromversorgung mit 5V über einen USB-Anschluss ist es möglich eine USB-Power Bank mit Strom zu betreiben. Damit ist es einfach möglich die Tags an beliebigen Orten unabhängig von vorhanden Stromquellen zu verteilen. Mit einer kleinen Power Bank in Preissegment von 5-10 Euro kann das BeSpoon über 24 Stunden betrieben werden.

Um die Genauigkeit der BeSpoons zu evaluieren, wurden mehrere Versuche mit verschiedenen Abständen zwischen einem Tag und dem Anchor durchgeführt. Dabei zeigt sich eine hohe Ungenauigkeit bei geringen Abständen bis 200 cm. Bei größeren Abständen bewegt sich die Abweichung zwischen 5 und 10 % im positiven Bereich. Das bedeutet es wir unabhängig von der tatsächlichen Entfernung immer eine größere Entfernung gemessen wird.
Aufgrund dieser ermittelten Werte wurde in der Sensordatenverarbeitung des entwickelten Treibers eine Korrektur der Daten vorgenommen
Um BeSpoon für die Indoor-Lokalisation zu nutzen wurde ein Raum vermessen und die 3 Tags angebracht. Deren Standort wurde präzise bestimmt. Es wurde ein Treiber in Java entwickelt, dieser empfängt die Abstandsdaten des Ankers uber eine serielle Schnittstelle und ermittelt die genaue Position mithilfe von Trilateration.